- Механика контактного взаимодействия
-
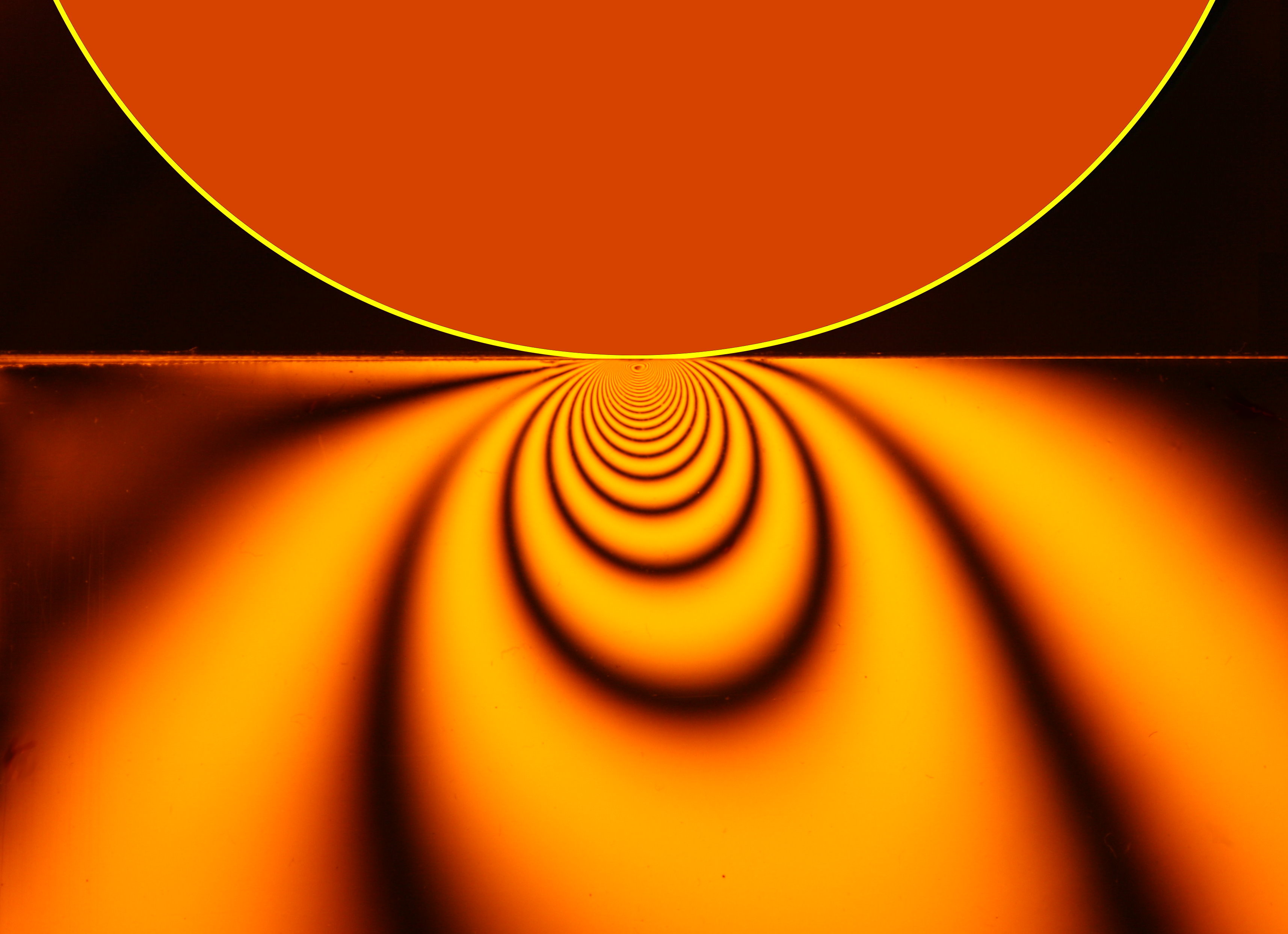
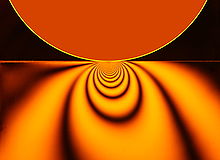 Напряжения в области контакта при одновременном нагружении нормальной и касательной силой. Напряжения определены методом фотоупругости
Напряжения в области контакта при одновременном нагружении нормальной и касательной силой. Напряжения определены методом фотоупругости
Механика контактного взаимодействия занимается расчётом упругих, вязкоупругих и пластичных тел при статическом или динамическом контакте. Механика контактного взаимодействия является основополагающей инженерной дисциплиной, обязательной при проектировании надёжного и энергосберегающего оборудования. Она будет полезна при решении многих контактных задач, например, колесо-рельс, при расчёте муфт, тормозов, шин, подшипников скольжения и качения, двигателей внутреннего сгорания, шарниров, уплотнений; при штамповке, металлообработке, ультразвуковой сварке, электрических контактах и др. Она охватывает широкий спектр задач, начиная от расчётов прочности элементов сопряжения трибосистемы с учётом смазывающей среды и строения материала, до применения в микро- и наносистемах.
История
Классическая механика контактных взаимодействий связана прежде всего с именем Генриха Герца. В 1882 году Герц решил задачу о контакте двух упругих тел с искривлёнными поверхностями. Этот классический результат и сегодня лежит в основе механики контактного взаимодействия. Лишь столетие спустя Джонсон, Кендал и Робертс нашли аналогичное решение для адгезионного контакта (JKR – теория).
Дальнейший прогресс механики контактного взаимодействия в середине 20-го столетия связан с именами Боудена и Тейбора. Они первые указали на важность учёта шероховатости поверхности контактируемых тел. Шероховатость приводит к тому, что действительная площадь контакта между трущимися телами намного меньше кажущейся площади контакта. Эти представления существенно изменили направление многих трибологических исследований. Работы Боудена и Тейбора вызвали появление ряда теорий механики контактного взаимодействия шероховатых поверхностей.
Пионерскими работами в этой области являются работы Архарда (1957), который пришёл к заключению, что при контакте упругих шероховатых поверхностей площадь контакта примерно пропорциональна нормальной силе. Дальнейший важный вклад в теорию контакта шероховатых поверхностей внесли Гринвуд и Виллиамсон (1966) и Перcсон (2002). Главным результатом этих работ является доказательство того, что действительная площадь контакта шероховатых поверхностей в грубом приближении пропорциональна нормальной силе, в то время как характеристики отдельного микроконтакта (давление, размер микроконтакта) слабо зависят от нагрузки.
Классические задачи механики контактного взаимодействия
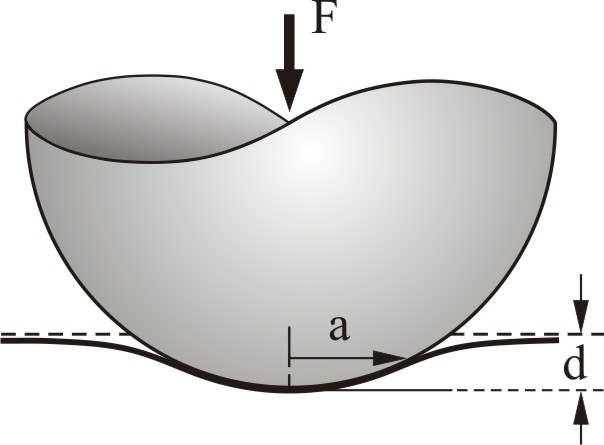
Контакт между шаром и упругим полупространством
 Контакт между шаром и упругим полупространством
Контакт между шаром и упругим полупространствомТвёрдый шар радиуса
 вдавливается в упругое полупространство на глубину
вдавливается в упругое полупространство на глубину  (глубина проникновения), образуя область контакта радиуса
(глубина проникновения), образуя область контакта радиуса  .
.Необходимая для этого сила равна
 ,
,причём
 .
. и
и  здесь модули упругости, а
здесь модули упругости, а  и
и  — коэффициенты Пуассона обоих тел.
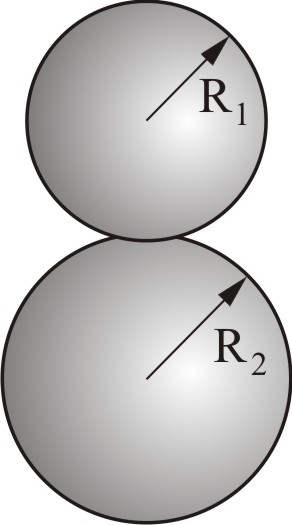
— коэффициенты Пуассона обоих тел.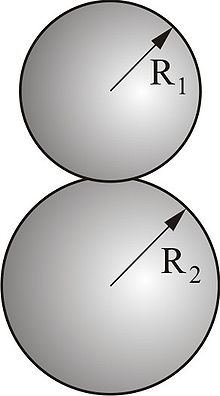 Контакт между двумя шарами
Контакт между двумя шарамиПри контакте двух шаров с радиусами
 и
и  эти уравнения справедливы соответственно для радиуса
эти уравнения справедливы соответственно для радиуса 
Распределение давления в площади контакта рассчитывается как

с
 .
.Максимальное касательное напряжение достигается под поверхностью, для
 при
при  .
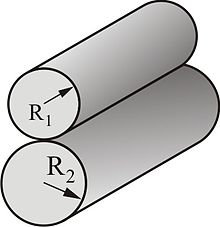
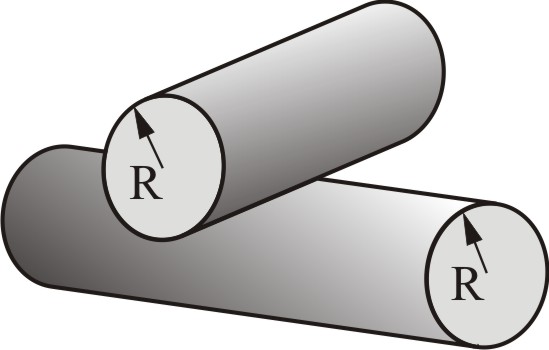
.Контакт между двумя скрещивающимися цилиндрами с одинаковыми радиусами
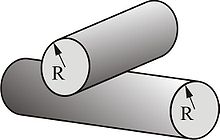 Контакт между двумя скрещенными цилиндрами с одинаковыми радиусами
Контакт между двумя скрещенными цилиндрами с одинаковыми радиусами
Контакт между двумя скрещенными цилиндрами с одинаковыми радиусами эквивалентен контакту между шаром радиусом и плоскостью (см.выше).Контакт между твёрдым цилиндрическим индентором и упругим полупространством
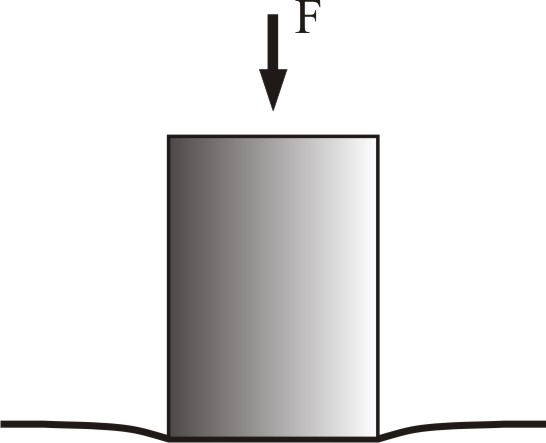
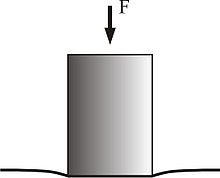 Контакт между твердым цилиндрическим индентором и упругим полупространством
Контакт между твердым цилиндрическим индентором и упругим полупространствомЕсли твёрдый цилиндр радиусом a вдавливается в упругое полупространство, тo давление распределяется следующим образом

причём
 .
.Связь между глубиной проникновения и нормальной силой определяется
 .
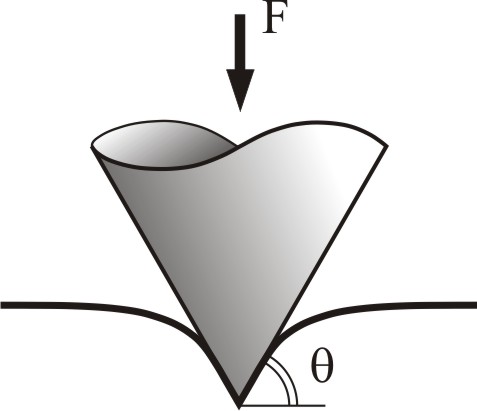
.Контакт между твёрдым коническим индентором и упругим полупространством
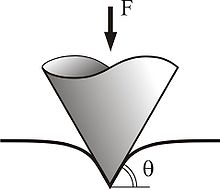 Контакт между конусом и упругим полупространством
Контакт между конусом и упругим полупространствомПри индентировании упругого полупространства твёрдым конусообразным индентером глубина проникновения и радиус контакта связаны следующим соотношением:
 .
. есть угол между горизонталью и боковой плоскостью конуса. Распределение давления определяется формулой
есть угол между горизонталью и боковой плоскостью конуса. Распределение давления определяется формулой .
.Напряжение в вершине конуса (в центре области контакта) изменяется по логарифмическому закону. Суммарная сила рассчитывается как
 .
.Контакт между двумя цилиндрами с параллельными осями
 Контакт между двумя цилиндрами с параллельными осями
Контакт между двумя цилиндрами с параллельными осями
В случае контакта между двумя упругими цилиндрами с параллельными осями сила прямо пропорциональна глубине проникновения: .
.Радиус кривизны в этом соотношении вообще не присутствует. Полуширина контакта определяется следующим отношением
,с
как и в случае контакта между двумя шарами. Максимальное давление равно
 .
.Контакт между шероховатыми поверхностями
Когда два тела с шероховатыми поверхностями взаимодействуют друг с другом, то реальная площадь контакта
 намного меньше, чем видимая площадь
намного меньше, чем видимая площадь  . При контакте между плоскостью со случайно распределённой шероховатостью и упругим полупространством реальная площадь контакта пропорциональна нормальной силе
. При контакте между плоскостью со случайно распределённой шероховатостью и упругим полупространством реальная площадь контакта пропорциональна нормальной силе  и определяется следующим уравнением:
и определяется следующим уравнением:
При этом
 — среднеквадратичное значение неровности плоскости и
— среднеквадратичное значение неровности плоскости и  . Среднее давление в реальной площади контакта
. Среднее давление в реальной площади контакта
рассчитывается в хорошем приближении как половина модуля упругости
 , умноженная на среднеквадратичное значение неровности профиля поверхности . Если это давление больше твёрдости
, умноженная на среднеквадратичное значение неровности профиля поверхности . Если это давление больше твёрдости  материала и, таким образом
материала и, таким образом ,
,то микронеровности находятся полностью в пластичном состоянии. Для
 поверхность при контакте деформируется только упруго. Величина
поверхность при контакте деформируется только упруго. Величина  была введена Гринвудом и Виллиамсоном и носит название индекса пластичности. Факт деформирования тела, упругого или пластического, не зависит от приложенной нормальной силы.
была введена Гринвудом и Виллиамсоном и носит название индекса пластичности. Факт деформирования тела, упругого или пластического, не зависит от приложенной нормальной силы.Литература
- K. L. Johnson: Contact mechanics. Cambridge University Press, 6. Nachdruck der 1. Auflage, 2001.
- Popov, Valentin L.: Kontaktmechanik und Reibung. Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation, Springer-Verlag, 2009, 328 S., ISBN 978-3-540-88836-9.
- Popov, Valentin L.: Contact Mechanics and Friction. Physical Principles and Applications, Springer-Verlag, 2010, 362 p., ISBN 978-3-642-10802-0.
- I. N. Sneddon: The Relation between Load and Penetration in the Axisymmetric Boussinesq Problem for a Punch of Arbitrary Profile. Int. J. Eng. Sci., 1965, v. 3, pp. 47–57.
- S. Hyun, M. O. Robbins: Elastic contact between rough surfaces: Effect of roughness at large and small wavelengths. Trobology International, 2007, v.40, pp. 1413–1422.
Категории:- Теория упругости
- Механика твёрдого тела

Wikimedia Foundation. 2010.